首页
机器人
双足机器人Pi
模块化开源Pi+
人形机器人Hi
核心零部件
伺服关节模组
– 行星系列关节模组
– 超薄系列关节模组
– 中空关节模组
机械臂
控制器
电池
服务与支持
文档中心
下载中心
条款与政策
售后处理
新闻动态
关于我们
联系我们
English
通过先进的技术和产品
为机器人行业创造
新的可能
了解更多
高性能双足机器人
Mini
Pi
了解更多
低成本模块化开源
Mini
Pi plus
了解更多
高性能人形机器人
Mini
Hi
了解更多
机器人
ROBOTICS
高性价比
超小体积
超高性能
灵活稳定
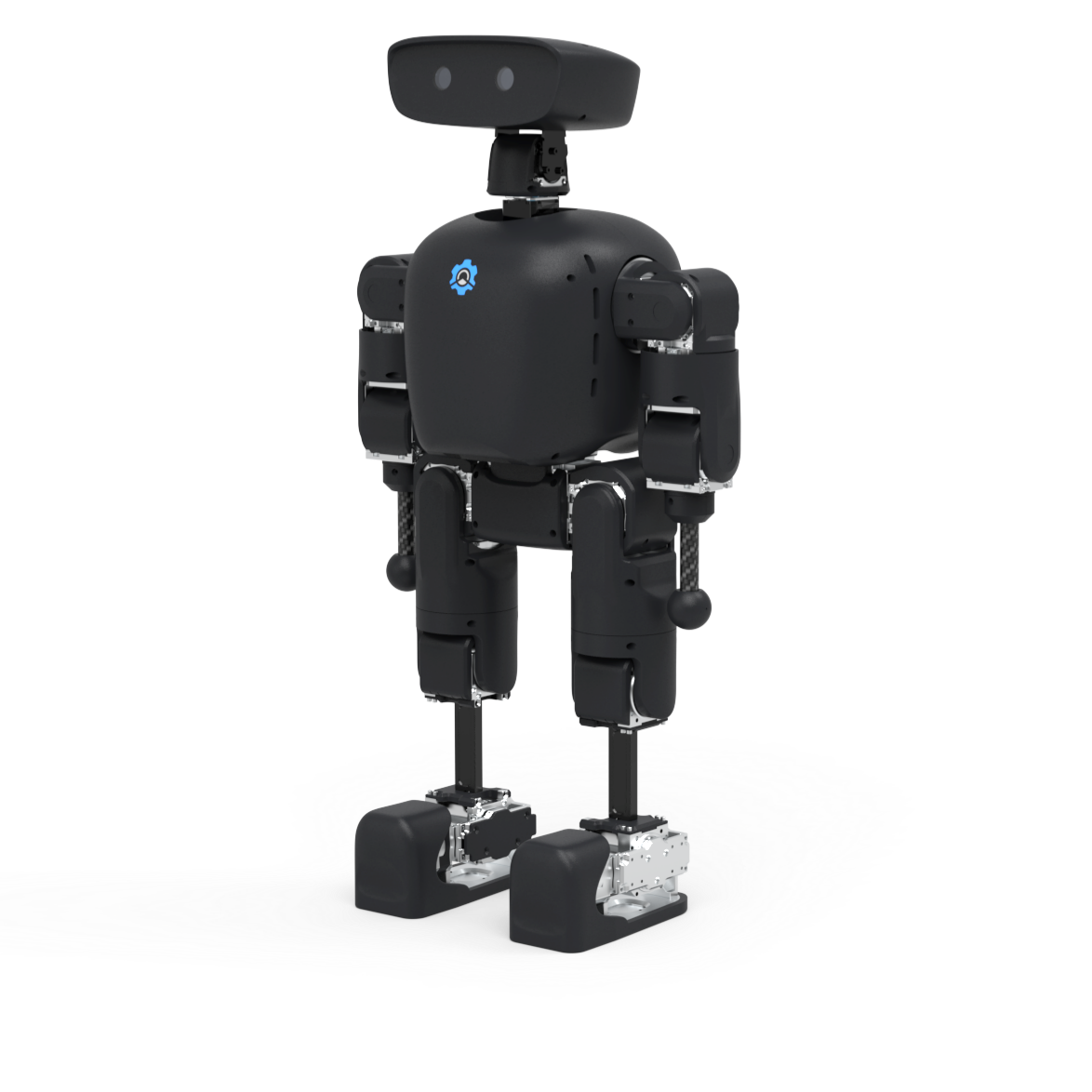
人形机器人 Mini Hi
首个超高性价比人形机器人,一款真正适用于科研领域的二次开发平台
人形机器人Mini Hi
小体积
高性能
高性价比
支持二次开发
高度
重量
负载
工作电压
自由度
810mm
21.5kg
20KG
48V
23
手臂
腰部
腿
峰值关节扭矩
高性能CPU
2*5个自由度
1个自由度
2*6个自由度
36Nm
RK3588/NVIDIA
购买咨询
了解详情
人形机器人 Mini Pi plus
首创模块化理念,助力打造专属的人形机器人
低成本模块化开源Mini Pi plus
小体积
高性能
高性价比
支持二次开发
高度
重量
工作电压
自由度
腿
680mm
14.6kg
24V
22DOF
2*6个自由度
手臂
头
负载重量
续航
BMS电池
2*4个自由度
1*2个自由度
10kg
>1H
4500mAh
购买咨询
了解详情
双足机器人 Mini Pi
首个万元级双足机器人,一款真正适用于科研领域的二次开发平台
高性能双足机器人Pi
小体积
高性能
高性价比
支持二次开发
站立高度
重量
载荷
运动速度
自由度
500mm
9kg
15KG
1.5m/s
12
购买咨询
了解详情
伺服关节模组
ACTUATOR
高精度
零背隙
温升低
高效率
大扭矩
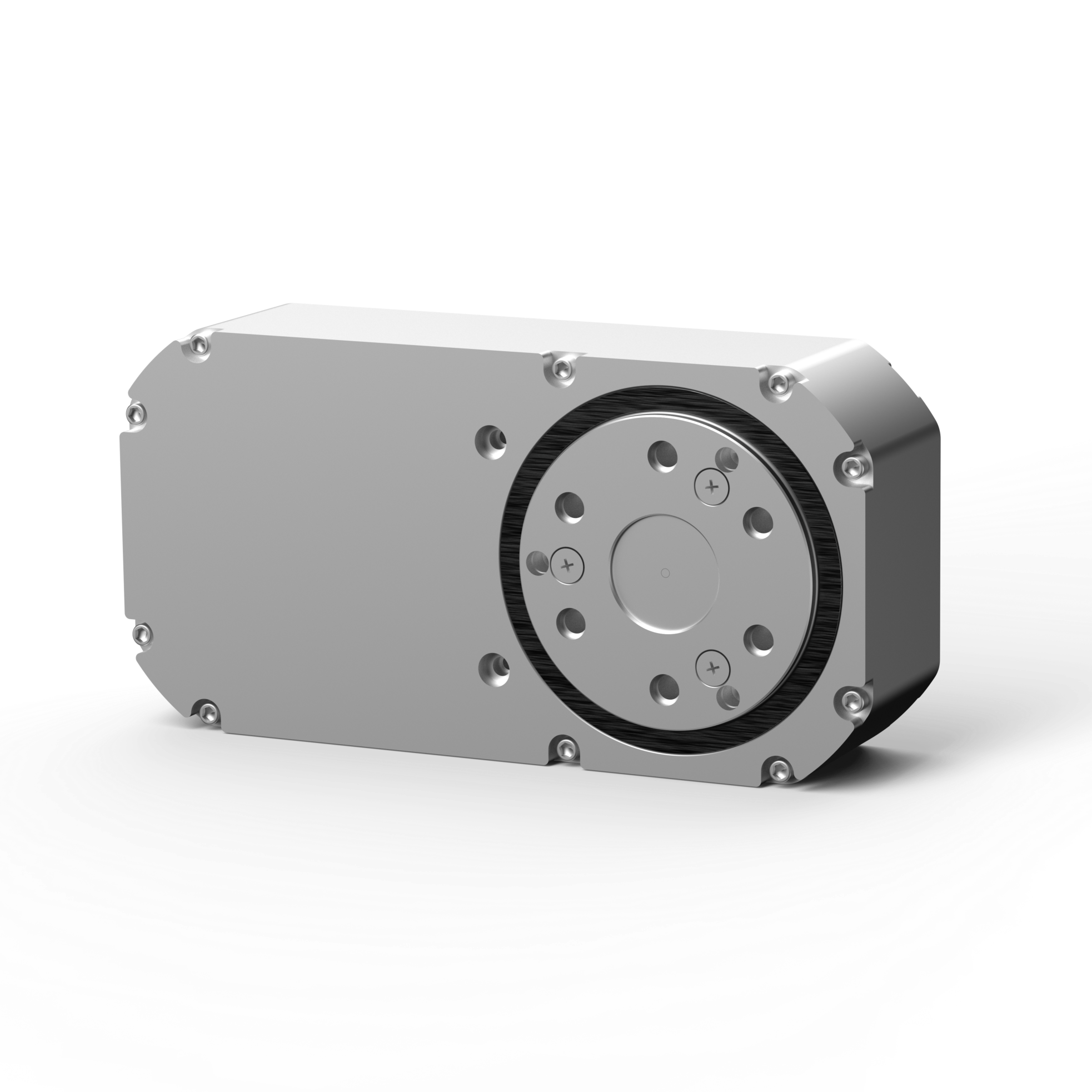
行星系列关节模组
HTDW系列和HTPW系列行星关节模组主要由优化设计的行星齿轮减速机和自主设计的无刷直流电机组成。配备
低齿间隙转矩、转矩脉动和双绝对值编码器,支持电流或扭矩控制
。广泛应用于自动化设备、机器人技术和航空航天等领域,特别适用于空间受限且需要精确动力分配的场景。
HTPW-7507-02-DNE
HTDW-4438-30-NE-JC
HTDW-4438-30-NE
HTDW-5022-02-DNE
HTDW-5036-02-DNE
HTDW-5036-02-CNE
HTDW-6036-02-DNE
HTDW-6036-02-CNE
HTDW-7535-02-CNE
超大扭矩
超小体积
高性价比
双编码器
电机长宽
电机高度
重量
减速比
额定扭矩
75mm
35mm
390g
7
4Nm
堵转扭矩
额定输出功率
额定转速
空载转速
通信方式
12Nm
92W
250rpm
270rpm
CAN、CANFD
购买咨询
了解详情
超大扭矩
超小体积
高性价比
双编码器
电机长宽
电机高度
重量
减速比
额定扭矩
44mm
44.9mm
237g
30
2Nm
堵转扭矩
额定输出功率
额定转速
空载转速
通信方式
10Nm
8.5W
40rpm
160rpm
CAN、CANFD
购买咨询
了解详情
超大扭矩
超小体积
高性价比
双编码器
电机长宽
电机高度
重量
减速比
额定扭矩
44mm
43.4mm
237g
30
2Nm
堵转扭矩
额定功率
额定转速
空载转速
通信方式
10Nm
8.5W
40rpm
160rpm
CAN、CANFD、485
购买咨询
了解详情
超大扭矩
超强爆发
超高精度
双编码器
长宽
高度
重量
减速比
扭矩常数
50mm
47.4mm
322g
20
0.54Nm/A
极对数
堵转扭矩
空载转速
额定扭矩
额定转速
14
13Nm
123rpm
3.5Nm
82rpm
购买咨询
了解详情
超大扭矩
超小体积
高性价比
双编码器
电机长宽
电机高度
重量
减速比
额定扭矩
50mm
47.4mm
323g
36
6Nm
堵转扭矩
额定输出功率
额定转速
空载转速
通信方式
21Nm
30W
50rpm
75rpm
CAN、CANFD
购买咨询
了解详情
超大扭矩
超强爆发
超高精度
双编码器
长宽
高度47.4mm
重量
扭矩常数
极对数
50mm
345g
0.54Nm/A
14
减速比
堵转扭矩
空载转速
额定扭矩
额定转速
36
21Nm
75rpm
6Nm
50rpm
购买咨询
了解详情
超大扭矩
超小体积
超高精度
双编码器
电机长宽
电机高度
重量
减速比
额定扭矩
60mm
56mm
565g
36
10Nm
购买咨询
了解详情
超大扭矩
超强爆发
超高精度
双编码器
长宽
高度
重量
极对数
减速比
60mm
56mm
570g
14mm
36
空载转速
堵转扭矩
额定转速
额定输出功率
通信方式
60rpm
36Nm
50rpm
52W
FDCAN、CAN
购买咨询
了解详情
超大扭矩
超强爆发
超高精度
双编码器
电机长宽
电机高度
重量
减速比
额定扭矩
75mm
56mm
850g
35
18Nm
堵转扭矩
额定转速
空载转速
通信方式
额定输出功率
60Nm
50rpm
60rpm
FDCAN、CAN
94W
购买咨询
了解详情
超薄系列关节模组
HTPU系列关节模组主要是由并排齿轮、行星齿轮组构成的减速机和自主设计的无刷直u流电机组成。配备低齿间隙转矩,转矩脉动和双绝对值编码器,支持电流或扭矩控制。广泛应用于外骨骼设计/穿戴设备/小型人形机器人/机械臂等领域,其独特扁平化设计可为各类空间受限场景传动提供更多选择。
HTPU-7033-04-CNE
HTPU-6035-04-CNE
扁平化设计
超大扭矩
超高精度
双编码器
电机长度
电机宽度
电机高度
电机重量
额定扭矩
140.5mm
71.5mm
36.9mm
808g
20Nm
购买咨询
了解详情
扁平化设计
超大扭矩
超高精度
双编码器
长度
宽度
高度
重量
减速比
115mm
61.9mm
37mm
558g
35
堵转扭矩
空载转速
额定扭矩
额定转速
额定输出功率
36Nm
60rpm
10Nm
50rpm
52W
购买咨询
了解详情
中空关节模组
HTCP系列和HTCW系列摆线中空关节模组主要由优化设计的摆线针轮减速机和自主设计的无刷直流电机组成。配备低齿间隙转矩、转矩脉动和双绝对值编码器,支持电流或扭矩控制。广泛应用于自动化设备、机器人技术和航空航天等领域,中空设计方便布线,特别适用于空间受限、且需要精确动力分配的场景。
HTCP-5031-06-CYC
HTCP-4531-06-CYC
超大扭矩
超小体积
高性价比
双编码器
电机长宽
电机高度
重量
减速比
额定扭矩
50mm
53.4mm
385g
31
4Nm
堵转扭矩
额定输出功率
额定转速
空载转速
通信方式
16Nm
21W
50rpm
103rpm
CAN、CANFD
购买咨询
了解详情
电机长宽
电机高度
重量
减速比
额定扭矩
44mm
44.9mm
237g
31
2Nm
堵转扭矩
额定输出功率
额定转速
空载转速
通信方式
10Nm
8.5W
40rpm
160rpm
CAN、CANFD
购买咨询
了解详情
减速机
GEAR UNITS
高精度
高效率
大扭矩
轴对称
高性能
合作伙伴
100+企业科研团队,50+高校实验室
荣誉奖项
2026年
北京亦庄半程马拉松最佳设计奖
2025年
阿里巴巴机器人运动会障碍赛冠军
2025年
阿里巴巴机器人运动会季军
2025年
首届人形机器人半程马拉松参赛证书
2025年
首届具身智能机器人运动会应用场景创新奖
2025年
人形机器人性能卓越奖
2025年
国际人形机器人技能大赛足球挑战赛冠军
2024年
第十三届中国创新创业大赛(广州赛区)三等奖
2024年
广州工业机器人制造和应用产业联盟
2024年
机器人一体化关节卓越标杆奖
2024年
人形机器人性能卓越奖
2024年
ARTS银牌合作单位
2023年
世界机器大会”投创之星“
2026年
北京亦庄半程马拉松最佳设计奖
2025年
阿里巴巴机器人运动会障碍赛冠军
2025年
阿里巴巴机器人运动会季军
2025年
首届人形机器人半程马拉松参赛证书
2025年
首届具身智能机器人运动会应用场景创新奖
2025年
人形机器人性能卓越奖
2025年
国际人形机器人技能大赛足球挑战赛冠军
2024年
第十三届中国创新创业大赛(广州赛区)三等奖
2024年
广州工业机器人制造和应用产业联盟
2024年
机器人一体化关节卓越标杆奖
2024年
人形机器人性能卓越奖
2024年
ARTS银牌合作单位
2023年
世界机器大会”投创之星“
扫码了解更多详情
×
获取详细资料
*
姓名
*
电话
*
公司名称及岗位职称
*
产品
不限产品
人形机器人 Mini Hi
人形机器人 Mini Pi plus
双足机器人 Mini Pi
行星系列关节模组
超薄系列关节模组
中空关节模组
机械臂
控制器
电池
*
型号
不限型号
Panthera-HT 6轴机械臂
HTCP-5031-06-CYC
HTCP-4531-06-CYC
HTPW-7507-02-DNE
HTDW-4438-30-NE-JC
7路 CAN 主控盒子控制器
HTB48-01 电池
HTB24-02 电池
低成本模块化开源Mini Pi plus
HTPU-7033-04-CNE
HTPU-6035-04-CNE
人形机器人Mini Hi
高性能双足机器人Pi
HTDW-4438-30-NE
HTDW-5022-02-DNE
HTDW-5036-02-DNE
HTDW-5036-02-CNE
HTDW-6036-02-DNE
HTDW-6036-02-CNE
HTDW-7535-02-CNE
*
需求
提交
使用微信扫一扫添加“客服”
表单提交成功!
表单提交失败!



.png?orientation=landscape&width=7680&height=4802)





















(无字版)-1.png?orientation=landscape&width=500&height=500)

























三等奖.png?orientation=portrait&width=691&height=2533)